





文摘
临床应用的安全性和有效性的一个智能oropharyngeal-swab机器人,COVID-19大流行及其含义https://bit.ly/2BUsV55
给编辑:
冠状病毒疾病2019 (COVID-19),由感染引起的严重急性呼吸系统综合症冠状病毒2 (SARS-CoV-2),是通过呼吸道飞沫和密切接触传播1- - - - - -4]。诊断COVID-19,口咽拭子(OP棍)抽样广泛用于病毒核酸检测(3]。然而,卫生保健工作者进行OP拭子是谁在高感染风险由于气溶胶从病人过程中取样。和质量手册OP拭子不同收藏家之间的不一致,这可能导致误诊(5]。使用遥控OP擦洗机器人有可能避免医护人员与病人之间的密切联系,从而减少采样期间SARS-CoV-2感染的风险。在这里,我们发明了一种机器人采样(RS)系统和评估该系统的安全性和有效性在OP拭子取样期间的大流行。
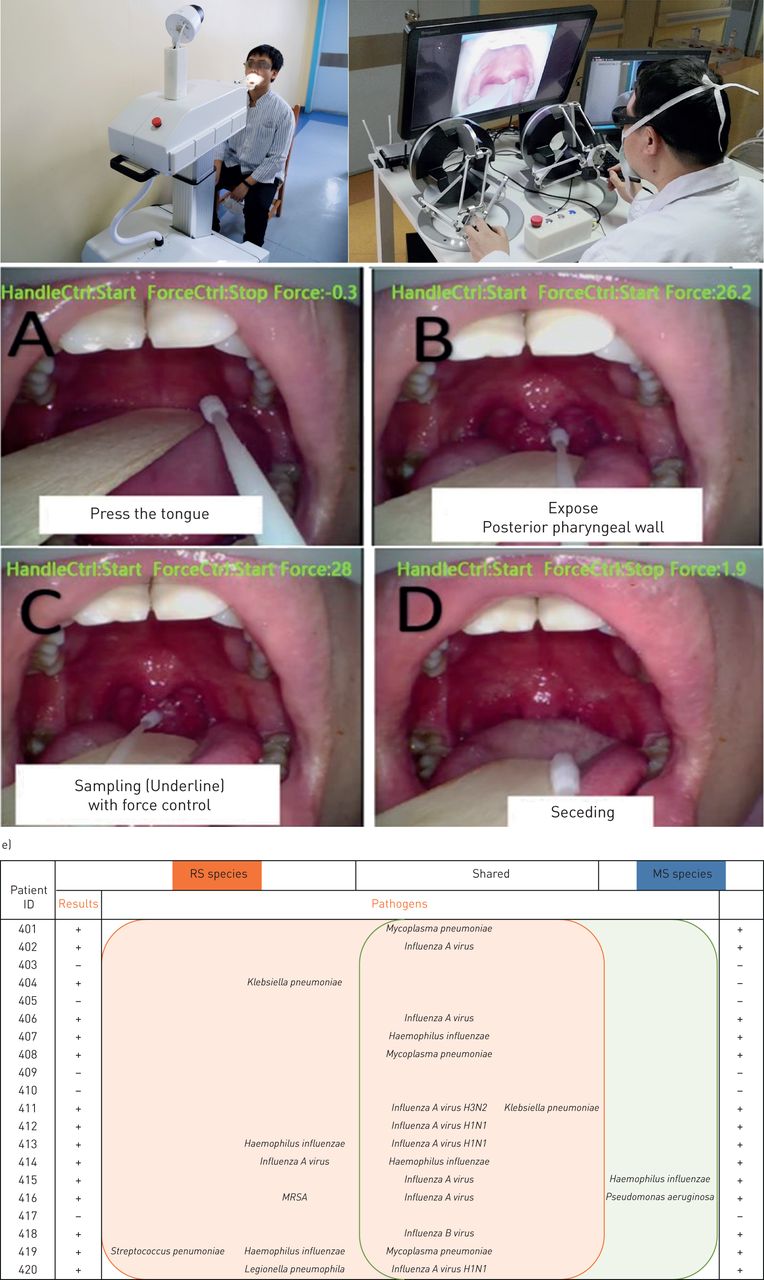
第一代半自动OP擦洗机器人,共同开发中国科学院沈阳自动化研究所和广州医科大学第一附属医院,是用于在本研究OP拭子(图1一个- d)。OP拭子采样使用机器人的接触分类根据可见的结构如下(6]。一级:软腭,喉头,小舌,支柱;二类:软腭,喉头,小舌;第三类:软腭、悬雍垂的基础;第四类:软腭不可见。类我被定义为好的视野(FOV)后咽壁,和类II-IV被定义为有限FOV的咽后壁。研究协议注册(ChiCTR2000030861)和伦理委员会批准广州医科大学第一附属医院(2020 - 46)。疑似COVID-19患者标准的基础上确定中国的国家健康委员会(7]。

代表图像的口咽拭子机器人及其抽样过程。b)的力控制模式启动,迫使Ctrl状态显示为“开始。“拖把自动前进,直到它触及后咽壁,达成预设力范围。目前力为26.2,显示在右上角。d)的力控制方式是停止,迫使Ctrl状态显示为“停止。“机械臂控制撤回拭子和撤退。e)病原体测试结果收集的口咽拭子和两个不同的抽样方法在20疑似冠状病毒疾病2019例。RS:机器人采样女士:手动取样。
采样参数,OP拭子机器人的安全性和有效性进行了20名健康个体使用四种不同抽样部队(60克)。效果确定的取样成功率(在第一次尝试完成),和拖把质量决定基于阈值周期(Ct)值为3 -磷酸甘油醛脱氢酶(GAPDH) rt - pcr (8]。OP棉签和Ct值≤37 > 37被认为是合格的和不合格的样本,分别。抽样不良反应测定干呕、喉咙痛、咽部充血,或受伤后咽壁后取样。比较研究的安全性和有效性之间RS和手动取样(MS)在30健康个体进行交叉试验。临床应用研究进行了连续20疑似COVID-19从发烧门诊病人病原体测试两种方法的结果进行比较。OP拭子样本收集的MS组通过擦拭后咽壁用无菌棉拭子由经验丰富的收藏家。数据正常测试通过Kolmogorov-Smirnov测试和均值±sd或中位数(四分位范围)。双面的独立样本t检验、单因子变异数分析或确切概率法被当作适当;被认为具有统计显著性p值< 0.05。
取样成功率是95%,20名健康受试者组使用RS时系统与不同的力量。Ct值显示,97%合格标本,标本的质量没有显著差异被发现在四个采样小组基于样本GADPH Ct值。(10 - 30 g组:31.50±3.5;集团20 - 40 g: 32.93±2.9;组30 - 50 g: 32.37±2.1;和组- g: 32.97±2.1;p = 0.346)。没有咽充血或伤害任何参与者;然而,喉咙痛的发生率更高时采样力> 40克(15.8%,6/38)相比,low-force (≤40 g)组(0/38;p = 0.025)。 Thus, 20–40 g force was selected for OP swab robot sampling in subsequent experiments. Next, we compared RS and MS system and showed 95% and 100% success rates, respectively, when measuring GAPDH in the swab samples in the crossover study. All specimens were qualified based on GAPDH Ct values of ≤37; however, variation of Ct value from MS specimens was more significant compared to RS specimens (27.14±2.0与27.86±2.02;p = 0.008)。然而,Ct值的差异数据不超过1,虽然有统计学差异,没有临床意义。无显著差异,两组间不良反应观察。拭子质量是影响有限FOV拭子标本具有良好FOV集团作为Ct值明显低于视场有限集团(Ct值好FOV组:27.33±1.99;视场有限集团的Ct值:28.61±1.87;p = 0.018)。有7和9例有限FOV的女士和RS组,分别。然而,在消除视场有限,影响因素无显著差异拭子质量被发现之间的女士和RS方法(27.05±2.0与27.61±1.97;p = 0.156)。RS采样时间(9±4.1 s)明显短于MS组(18±5.1年代;p = 0.032)。不良反应无显著差异在RS和MS组(10%之间与10%;p = 1)。
最后,OP棉签收集使用女士和RS在20个疑似COVID-19病人,包括八个男性和12个女性的平均年龄45±15年。OP拭子样本进行病原体检测。对所有疑似病例SARS-CoV-2核酸是负面的。病毒和支原体测试的结果都是阴性。有两例阳性细菌,包括一例葡萄球菌感染和另一个的情况莫拉克斯氏菌属复活感染。
病原体的发现结果的一致性之间的两种抽样方法20例疑似病例COVID-19达到95% (k = 0.875)。没有差异的成功率,拭子质量和病原体的发现结果发现OP拭子机器人与人工取样方法。
标准的OP拭子采样,包括精确的交付拭子目标组织,适当的力和接触避免周围组织,已确认是先决条件增强阳性检出率(9- - - - - -11]。女士拭子取样可能导致假阴性的结果由于缺乏经验和心理焦虑的抽样人员由于SARS-CoV-2传染性的本质5]。OP擦洗机器人远程摄像头可以帮助医疗人员有明确的愿景在抽样没有病人密切接触,从而导致高质量的拭子标本一贯的集合。虽然更大的力量被认为是能收集更多的细胞每拭子,我们的研究结果表明,之间没有相关性和取样拭子标本的质量力。因此,RS系统显示一个优势在OP拭子采样的质量控制,并有可能减少感染的风险医务工作者(11]。
从研发到应用程序是按下的新兴传染病的危机。因此,第一代咽拭子机器人仍然需要医务助理手动更换隔离袖子和棉签收集标本后,这将减少但不能避免接触SARS-COV-2。然而,紫外线消毒和空气消毒机进行消毒后每个样本收集在最大的程度上避免风险。此外,鉴于这种情况,第二代智能机器人实现了智能运动和自动取代拭子和防护罩,,目前正在准备下一阶段的临床试验。它可以进一步提高智能的过程,减少人工参与的程度。
尽管这是一个初步的,只有研究有限COVID-19病人,抽样过程的智能OP拭子机器人是安全的,成功率很高的采样。OP的质量调查病原体的检出率不差那些手工收集。OP擦洗机器人提出了一种安全有效的抽样方法,和运营商能够避免交叉感染。在流行或大流行,OP拭子机器人具有良好的临床实践中的应用前景。
可共享的PDF
脚注
利益冲突:S-Q。李报道来自中国国家自然科学基金的拨款(批准号62043102),创新的广东科技政策和战略计划(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:何华麟。郭报道来自中国国家自然科学基金的拨款(批准号62043102),创新的广东科技政策和战略计划(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:h .刘报道来自中国国家自然科学基金的拨款(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:t .王报告从国家自然科学基金资助(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:等号左边。周报告来自中国国家自然科学基金的拨款(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:t . Yu报告从国家自然科学基金资助(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:bxcy。王报道来自中国国家自然科学基金的拨款(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:y m。杨的报告来自中国国家自然科学基金的拨款(批准号62043102),广东的创新和战略计划的科技政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:n。钟的报道来自中国国家自然科学基金的拨款(批准号62043102),广东科技的创新和战略计划政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:N-F。张报告来自中国国家自然科学基金的拨款(批准号62043102),广东科技的创新和战略计划政策(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
利益冲突:S-Y。李报道来自中国国家自然科学基金的拨款(批准号62043102),创新的广东科技政策和战略计划(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901),在进行这项研究的。
支持声明:本研究得到了国家自然科学基金(批准号62043102和62043102),创新的广东科技政策和战略计划(批准号2020 b111126005)和广州科技创新发展专项基金(批准号2060901)。资金信息,本文已沉积的Crossref资助者注册表。
- 收到了2020年5月12日。
- 接受2020年6月22日。
- 版权©2020人队。
这个版本分布在创作共用署名非商业性许可证的条款4.0。











{kind=link}
{kind=link}